
Active debris removal missions in low Earth orbits require the use of precise models of the relative dynamics, that is, of the orbital motion of each object with respect to the others. Not only this is key when designing the mission profile, but also allows to predict and avoid possible collisions that would lead to the failure of the mission and creation of more orbital debris. In a new paper published in the Journal of Guidance, Control and Dynamics, COMPASS team researchers Gabriella Gaias and Camilla Colombo propose an analytical framework that uses relative orbital elements as variables and that is also applicable to far-range rendezvous scenarios as well as to large relative orbits.
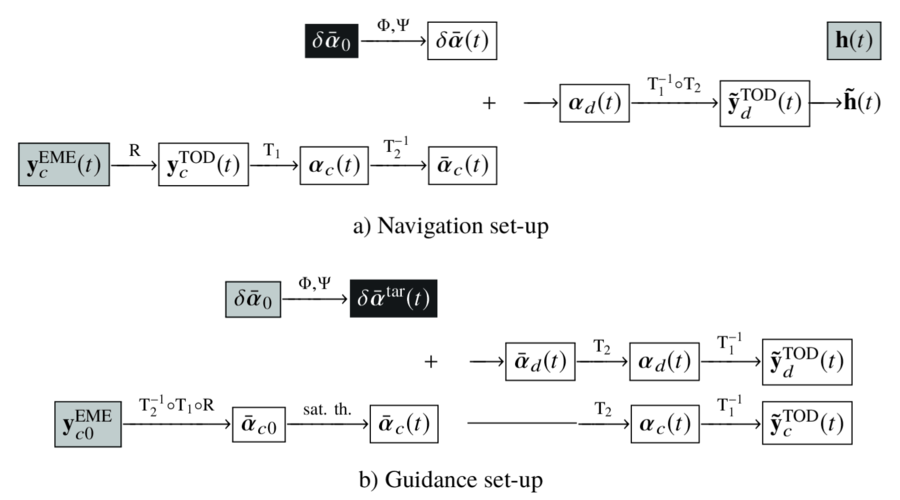
The paper describes the main building blocks of the framework as well as their interfaces because the key aspect to achieve precision is to set up a fully consistent environment. The results show the achievable accuracy under realistic operational conditions for possible guidance and navigation applications.
Datasets generated in this research are available at: https://doi.org/10.5281/zenodo.3734154 and can be used to recreate the plots of the paper.