
Spaceborne relative navigation systems require precise models of the relative dynamics and of the measurement equations to support computationally light algorithms for the estimation filter. In a paper recently published in Advances in Space Research by Gabriella Gaias, Jean-Sébatien Ardaens and Camilla Colombo, we propose a fully analytical precise framework to achieve this goal also at large intersatellite distances between target and chaser spacecraft.
The paper describes the main parts of the modelling framework and compares the accuracy performances against other approaches from the literature. Moreover, results are verified against the flight-data of the PRISMA mission, which flew in a very similar orbital environment of the one foreseen for priority targets of future active debris removal missions in low Earth orbits.
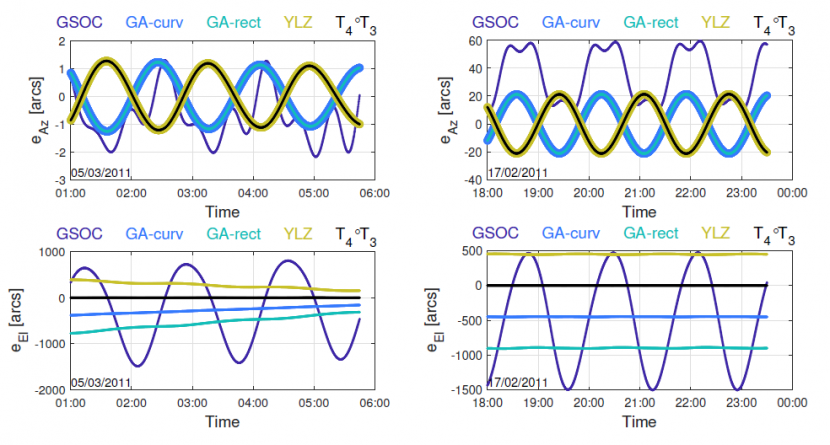
For far-range scenarios with relative out-of-plane motion up to 1 km of size, the observation residuals,
fitted with respect to the true line-of-sight reconstructed from flight data, lie within a 10 arc-second threshold. This figure is well below the typical noise of camera sensors employed for relative navigation purposes.
We thank DLR/GSOC for having shared some precise orbit determination products from the PRISMA mission.
The paper is accessible in open access at https://doi.org/10.1016/j.asr.2020.05.048. Check it out!