
Collision avoidance activities in orbit are key for a safe and sustainable use of space. Whenever a possible collision (also known as close approach) between a satellite and another spacecraft or space debris is forecasted, the satellite operators monitor the situation and decide whether an evasive manoeuvre is required. This involves many different players working together, as the tracking of satellites and space debris is normally done by entities other than the satellite operators. Moreover, the prediction of the future position and velocity of a space object is affected by different sources of uncertainty, and we can only talk in terms of collision probability. Each manoeuvre by a satellite reduces its propellant reserve, so operators must avoid taking unneeded action.
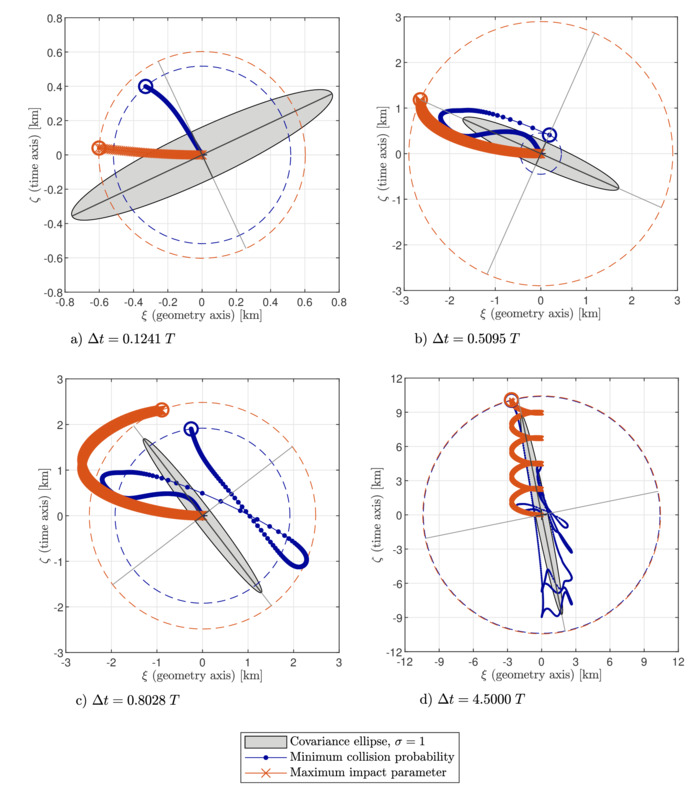
As the frequency and complexity of collision avoidance activities increase due to the ever-growing population of spacecraft and space debris, satellite operators need new and more powerful tools. In a recent study by Juan Luis Gonzalo, Camilla Colombo, and Pierluigi Di Lizia published at the Journal of Guidance, Control, and Dynamics, an analytical formulation for collision avoidance manoeuvres (CAMs) involving a spacecraft and a space debris is presented. The model allows to rapidly evaluate the result of implementing a given impulsive manoeuvre, as well as efficiently designing maximum deviation and minimum collision probability CAMs. A main novelty with respect to previous works is the extension of the analytical model to be able to rapidly evaluate the evolution of the uncertainties in time, which allows to better understand the trade-off between larger displacements and greater uncertainties as the anticipation of the manoeuvre increases. The paper presents an exhaustive analysis for different spacecraft–debris conjunction geometries, defined using statistical data from European Space Agency’s Meteoroid and Space Debris Terrestrial Environment Reference model.
If you want to learn more, check out the paper freely available in Open Access at: https://doi.org/10.2514/1.G005398