
In an era where proximity operations to uncooperative objects are on the rise, our paper addresses the pressing need for advanced technology to tackle the challenges of in-orbit servicing and removal missions.
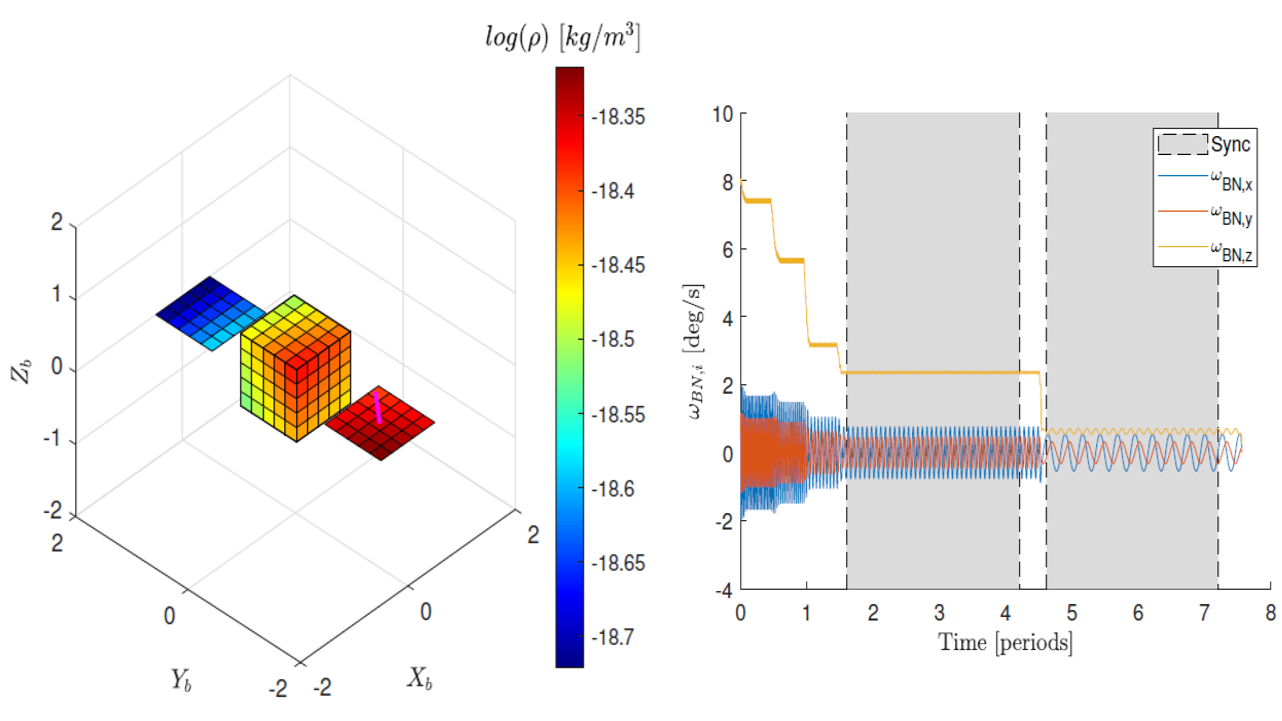
The new paper by Giacomo Borelli, Gabriella Gaias and Camilla Colombo tackled the challenges of controlling an uncooperative target rotational motion with a contactless method for a future capture. Specifically, novel guidance and control strategies during the contactless operations of plume impingement to stabilise the target are developed.